Projects
Skyline Delineation for Localization in Occluded Environments
Aug ’20 – Jan ‘21
Diva portal link
- Developed a novel method using semantic segmentation for accurate skyline detection in occluded environments with pixel-wise confidence scores
- Demonstrated effectiveness for monocular camera localization in GPS-denied areas using datasets from the Mars Perseverance Rover and uncrewed surface vessels
Hardware Design of an Unmanned Aerial Vehicle (UAV)
Aug ’20 – Jan ‘21
Project Webpage
- Designed and built a research drone platform tailored towards indoor navigation and visual SLAM
- Integrated sensors, including lidar cameras, with flight control unit (PX4) and companion computer (MAVROS)
- Manufactured modular components for simplified construction and easily configurable sensor payloads
|
|
|
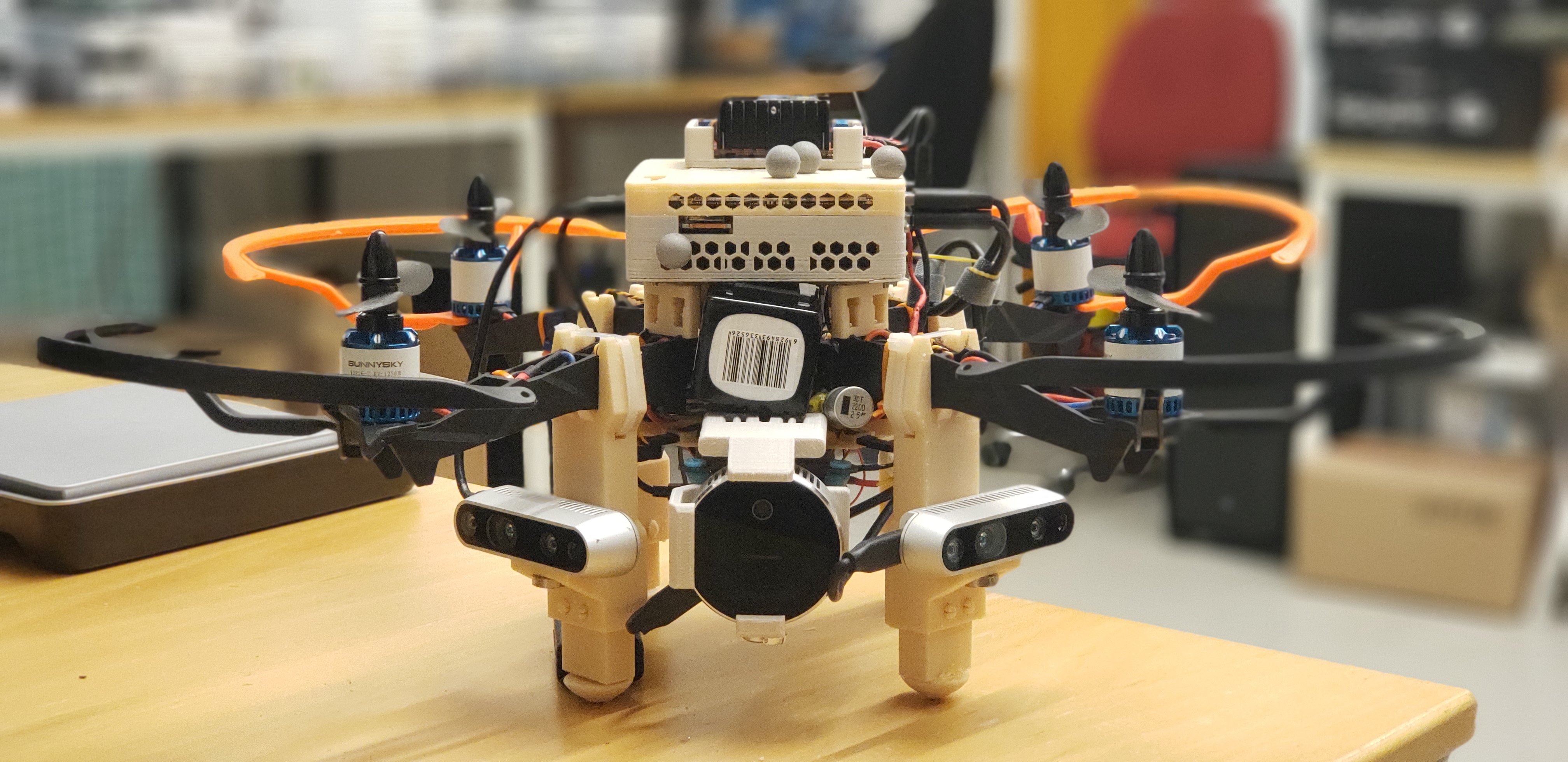
| Example flights can be seen on the Project Webpage |
Terrain Relative Navigation (TRN) for an Autonomous Underwater Vehicle (AUV)
Jan ’20 – Dec ‘20
Project Report
- Created a particle filter interface enabling co-researchers to prototype various AUV sensor configurations
- Researched optimal usage of MBES sonar data for TRN, including feature matching and gaussian processes
Comprehensive Robotic System for an Autonomous Micro Air Vehicle (MAV)
Jan ’20 – May ‘20
Project Repository
- Developed and integrated perception, localization, planning, and motion control for an autonomous MAV
- Built computer vision perception and localization systems using deep learning detection of traffic signs in real-time